
Hayon élévateur
Mise en situation
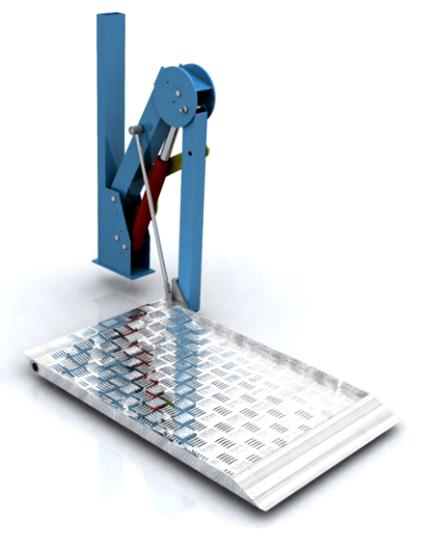 La société Bourgeois fabrique et commercialise des hayons élévateurs permettant l’accès d’un véhicule à toute personne se déplaçant en fauteuil roulant, sans modification de la carrosserie.
La société Bourgeois fabrique et commercialise des hayons élévateurs permettant l’accès d’un véhicule à toute personne se déplaçant en fauteuil roulant, sans modification de la carrosserie.
Le hayon étudié est de type « mono-bras » HBC 300. Compact, il est facilement adaptable sur la majorité des véhicules de type « fourgon » ou « monospace ».
Caractéristiques :
- Masse soulevable : 300 kg
- Commande électro hydraulique par boîte à boutons ou commande infrarouge
- Pompe manuelle intégrée
- Bras gauche ou droit
- Plateau repliable automatique
Description du mouvement
Deux phases de fonctionnement sont distinguées :
- Une phase de montée/descente du plateau à l’état horizontal.

A la fin de cette phase, le vérin s’arrête, permettant ainsi l’entrée ou la sortie du fauteuil roulant.
Durant cette phase la butée 7+8 rétrécit (montée) ou bien s’allonge (descente).
- Une phase de rangement du plateau appelée phase de « repliage » (passage de la position haute à la position repliée) permettant la fermeture de la porte du véhicule.

Durant cette phase, la butée 7+8 ne se déforme plus (solide).
Les différents mouvements sont obtenus par un seul actionneur : un vérin hydraulique alimenté par une pompe.
Travail demandé
L ‘objectif de l’étude est de déterminer les principales vitesses en début de phase de rangement, ainsi que la course supplémentaire nécessaire de la part du vérin hydraulique 4+5 pour finir le rangement.
‘objectif de l’étude est de déterminer les principales vitesses en début de phase de rangement, ainsi que la course supplémentaire nécessaire de la part du vérin hydraulique 4+5 pour finir le rangement.
Le mécanisme est représenté ci-contre dans la position particulière : exactement entre les deux phases, c’est à dire à l’instant précis où la phase de relevage se termine et la phase de rangement commence.
Course supplémentaire pour le rangement
La position « rangé » est définie par la position finale de la droite (AF’) (donnée sur le dessin).
Vitesses en début de phase de rangement
Le vérin 4+5 a une vitesse de sortie de tige de 1 cm/s.