
Exemples de Systèmes dynamiques simples
Systèmes du 1er ordre
Exemple mécanique : système masse-amortisseur

Il s’agit de mettre en mouvement une masse \(m\) par l’intermédiaire d’un amortisseur de coefficient de frottement \(f\).
Équation différentielle
\(\bbox[10px,border:2px solid black]{\large{\color{#00F}{V_e(t)}=\frac{m}{f}\frac{\mathbb{d}\color{#F00}{V_s(t)}}{\mathbb{d}t}+\color{#F00}{V_s(t)}}}\)
Réponse indicielle
La masse est mise en mouvement avec un échelon de vitesse \(V_1\).
 On observe que la réponse indicielle possède :
On observe que la réponse indicielle possède :
- pour \(t\rightarrow\infty\) : une asymptote horizontale d’ordonnée \(V_1\)
- à \(t=0\) : une tangente oblique qui coupe l’asymptote à \(t=\tau=\frac{m}{f}\)
- Augmenter \(m\) « ralenti » le système
- Augmenter \(f\) l' »accélère »…
Modèles MATLAB/Simscape
- R2021b : Masse_Amortisseur
Exemple électrique : circuit RC série

Une résistance \(R\) et un condensateur \(C\) en série sont soumis à une tension \(\color{#00F}{U_e(t)}\).
Équation différentielle
\(\bbox[10px,border:2px solid black]{\large{\color{#00F}{U_e(t)}=RC\frac{\mathbb{d}\color{#F00}{U_s(t)}}{\mathbb{d}t}+\color{#F00}{U_s(t)}}}\)
Réponse indicielle
 Le circuit est soumis à un échelon de tension \(U_1\).
Le circuit est soumis à un échelon de tension \(U_1\).
On mesure la tension aux bornes du condensateur …
On observe que la réponse indicielle possède :
- pour \(t\rightarrow\infty\) : une asymptote horizontale d’ordonnée \(U_1\)
- à \(t=0\) : une tangente oblique qui coupe l’asymptote à \(t=\tau=RC\)
- Augmenter \(R\) ou \(C\) « ralenti » le système…
Modèles MATLAB/Simscape
- Circuit_RC.slx (R2021b)
Systèmes du 2nd ordre
Exemple mécanique : système masse-ressort-amortisseur

Il s’agit de mettre en mouvement par l’intermédiaire d’un ressort de raideur \(k\) une masse \(m\) reliée au bâti par l’intermédiaire d’un amortisseur de coefficient de frottement \(f\).
Équation différentielle
\(\bbox[10px,border:2px solid black]{\large{\color{#00F}{X_e(t)}=\frac{m}{k}\frac{\mathbb{d}^2\color{#F00}{X_s(t)}}{\mathbb{d}t^2}+\frac{f}{k}\frac{\mathbb{d}\color{#F00}{X_s(t)}}{\mathbb{d}t}+\color{#F00}{X_s(t)}}}\)
Réponse indicielle
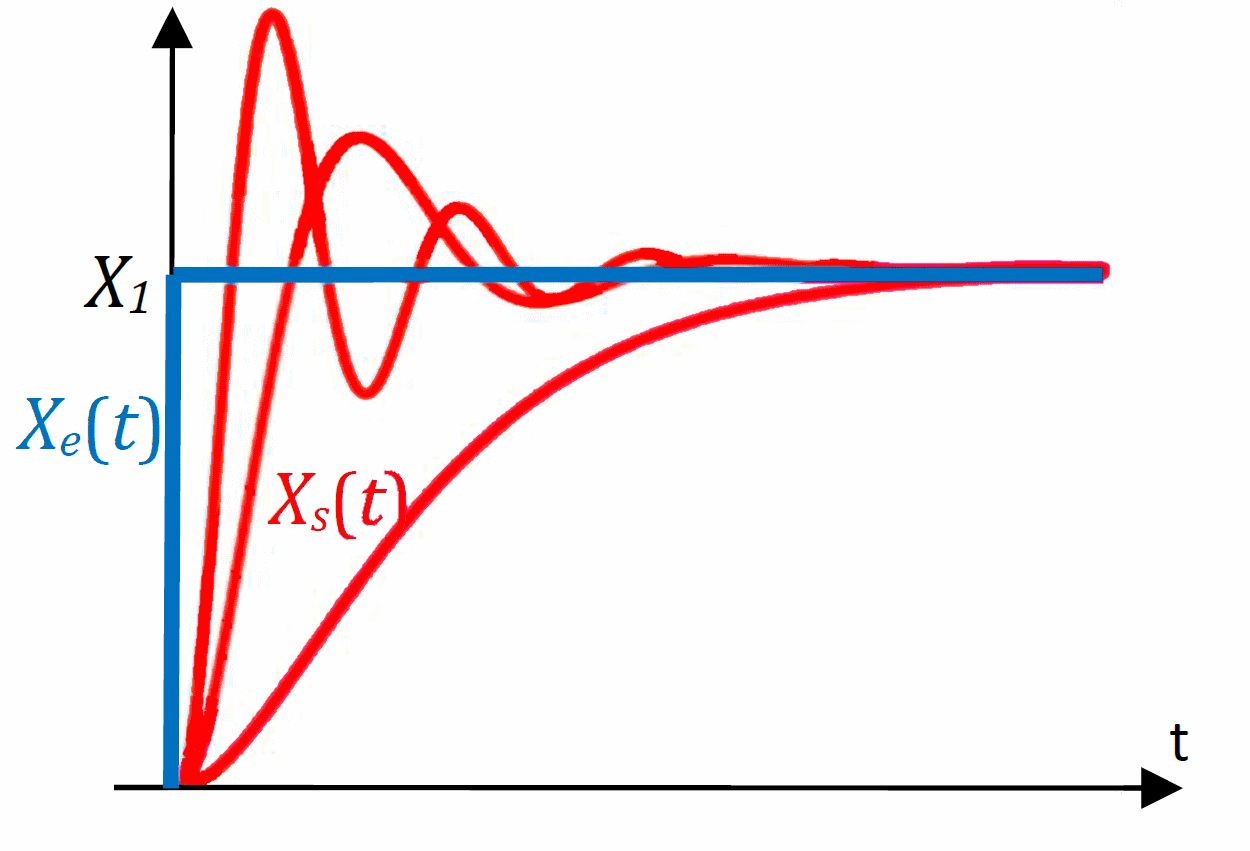 La masse est mise en mouvement avec un échelon de position \(X_1\). On mesure son déplacement.
La masse est mise en mouvement avec un échelon de position \(X_1\). On mesure son déplacement.
On observe que la réponse indicielle possède :
- pour \(t\rightarrow\infty\) : une asymptote horizontale d’ordonnée \(X_1\)
- à \(t=0\) : une tangente horizontale
Et selon les valeurs des paramètres \(m\), \(k\) et \(f\) :
- un dépassement ou pas
- des oscillations ou pas
- Augmenter \(f\) « ralenti » et « stabilise » le système
- Augmenter \(m\) ou \(k\) l' »accélère » et le « déstabilise »…
Modèles MATLAB/Simscape
- R2012b : Masse_Amortisseur_Ressort
Exemple électrique : circuit RLC série
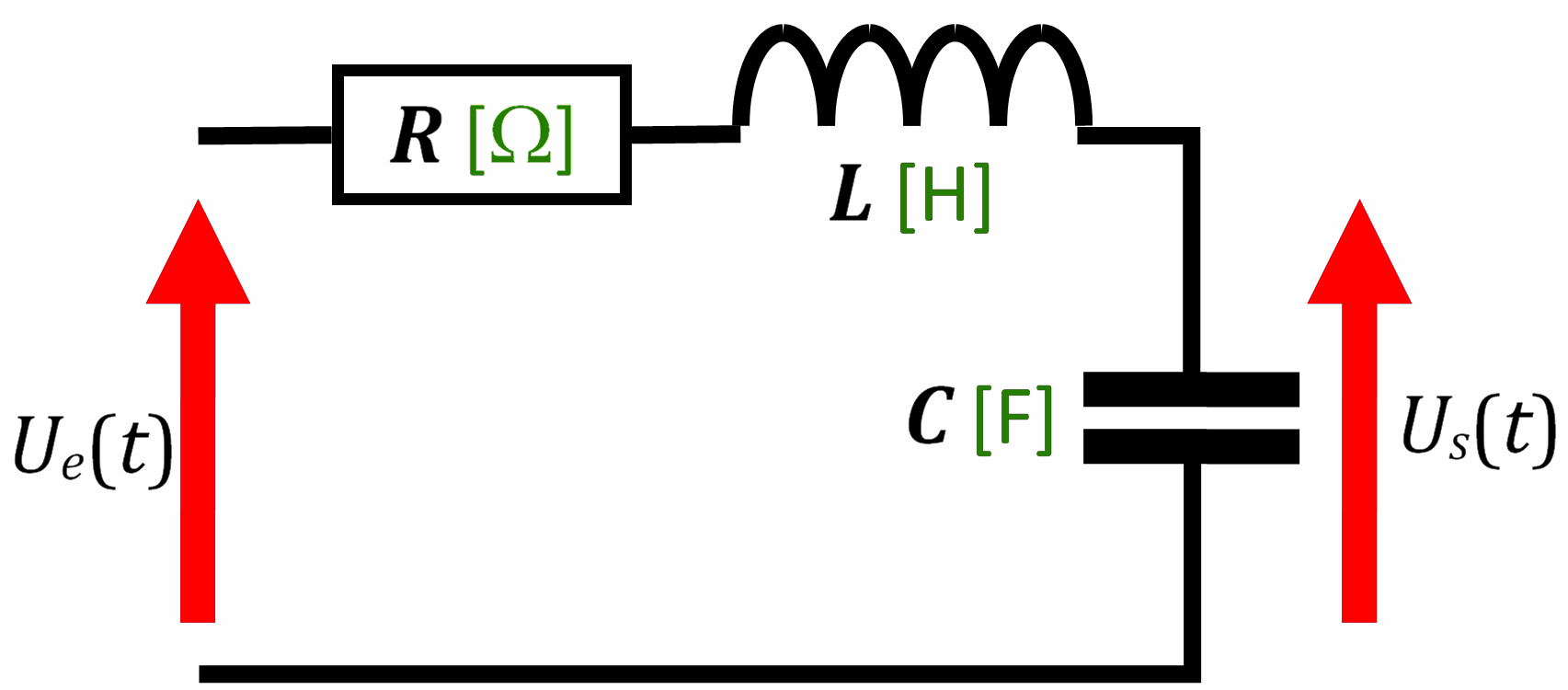
Une résistance \(R\) une inductance \(L\) et un condensateur \(C\) en série sont soumis à une tension \(\color{#00F}{U_e(t)}\)
Équation différentielle
\(\bbox[10px,border:2px solid black]{\large{\color{#00F}{U_e(t)}=LC\frac{\mathbb{d}^2\color{#F00}{U_s(t)}}{\mathbb{d}t^2}+RC\frac{\mathbb{d}\color{#F00}{U_s(t)}}{\mathbb{d}t}+\color{#F00}{U_s(t)}}}\)
Réponse indicielle
Le circuit est soumis à un échelon de tension \(U_1\). On mesure la tension aux bornes du condensateur …
On observe que la réponse indicielle possède :
- pour \(t\rightarrow\infty\) : une asymptote horizontale d’ordonnée \(mU_1\)
- à \(t=0\) : une tangente horizontale
Et selon les valeurs des paramètres \(R\), \(L\) et \(C\) :
- un dépassement ou pas
- des oscillations ou pas
- Augmenter \(C\) ou \(R\) « ralenti » et « stabilise » le système
- Augmenter \(L\) l' »accélère » et le « déstabilise »
Modèles MATLAB/Simscape
- R2012b : Circuit_RLC