
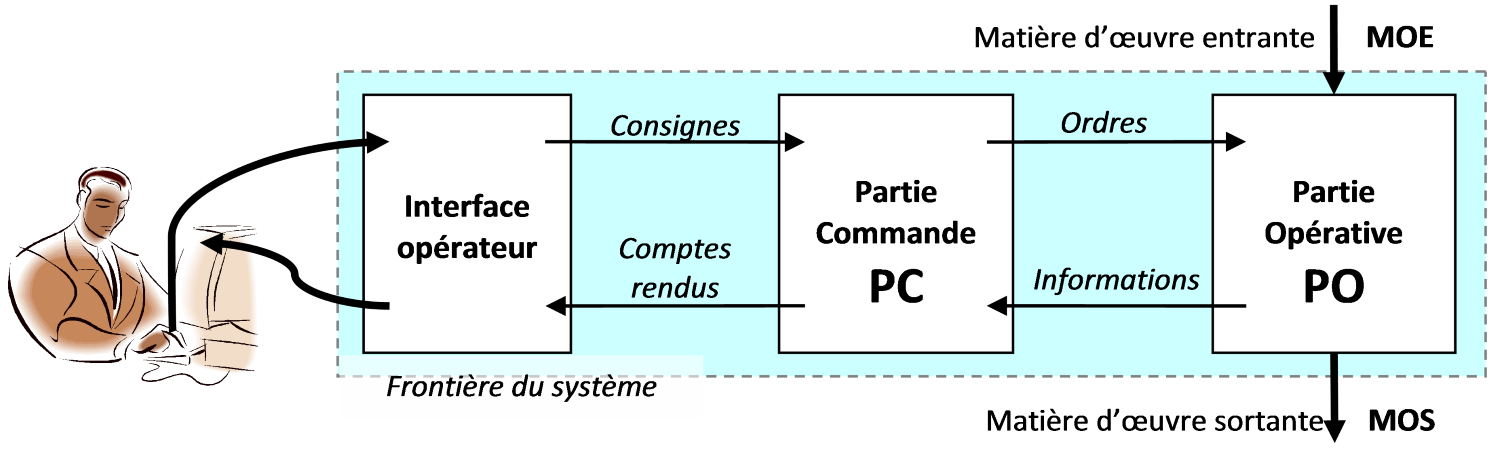
Structure générale d’un système
La structure du système définit ses différents constituants (matériels ou immatériels), donc les solutions techniques. C’est par conséquent une analyse qui intervient après la conception.
C’est un agencement de modules élémentaires, réalisant chacun une fonction bien particulière, permettant d’aboutir à la fonction globale du système.
On distingue trois parties :
- La Partie Commande (P.C.), c’est le domaine informationnel : collecte les informations, les traite, et coordonne la succession des actions de la partie opérative, en lui envoyant des ordres.
- La Partie Opérative (P.O.), c’est le domaine énergétique : elle reçoit les ordres de la PC, pour agir sur la matière d’œuvre, en transformant l’énergie fournie en énergie mécanique au moyen d’actionneurs, pour assurer des déplacements et/ou pour appliquer des actions mécaniques.
- L’interface opérateur (ou pupitre) : elle permet à un opérateur humain de paramétrer les comportements du système (clavier de commandes, pupitres…)
Les chaînes fonctionnelles
On peut distinguer au sein des systèmes techniques 3 chaînes :
- La chaîne d’information, agissant sur les flux de données,
- La chaîne d’énergie agissant sur les flux d’énergies,
- La chaîne d’action, agissant sur la matière d’œuvre.

La chaîne d’information
 Un capteur transforme une grandeur physique (position, vitesse, pression, température…), en une autre grandeur physique, compréhensible par la P.C. (en général un signal électrique). Il acquiert et code une information sur l’état du système ou de son environnement.
Un capteur transforme une grandeur physique (position, vitesse, pression, température…), en une autre grandeur physique, compréhensible par la P.C. (en général un signal électrique). Il acquiert et code une information sur l’état du système ou de son environnement.
Les capteurs devront être choisis en fonction de la nature du signal que l’on veut mesurer (binaire, numérique, ou analogique).
Les capteurs les plus couramment rencontrés sont :
 Capteur de position |
… mais il en existe beaucoup d’autre, pour mesurer ou détecter des paliers de :
• Pression : manomètre, pressostats,
• Vitesse : tachymètre
• Température : thermocouple
• Présence : détecteur inductifs ou capacitifs, optiques
• …
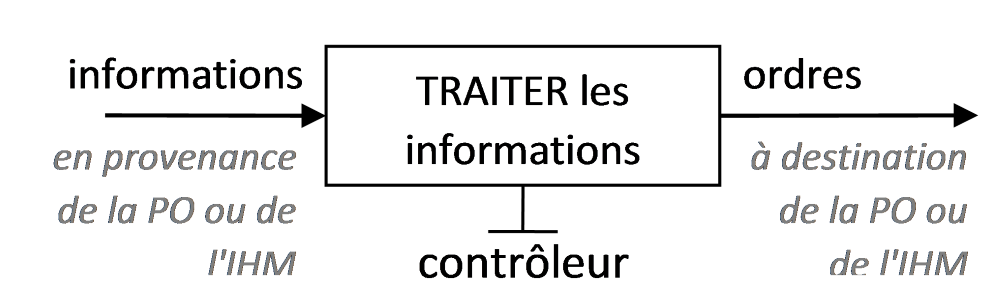 Un contrôleur traite les informations fournies par les capteurs et délivre les ordres à destination de la partie opérative. Il communique également avec l’interface Homme/Machine (IHM).
Un contrôleur traite les informations fournies par les capteurs et délivre les ordres à destination de la partie opérative. Il communique également avec l’interface Homme/Machine (IHM).
Les contrôleurs les plus couramment rencontrés sont :
 Microcontrôleur |
 Automate programmable |
La chaîne d’énergie
 Un actionneur converti l’énergie distribuée (électrique, pneumatique ou hydraulique), en énergie utilisable par la chaine d’action : il s’agit le plus souvent d’énergie mécanique, sous forme de mouvements (rotations ou translations, continues ou alternatives), qui agissent sur la matière d’œuvre.
Un actionneur converti l’énergie distribuée (électrique, pneumatique ou hydraulique), en énergie utilisable par la chaine d’action : il s’agit le plus souvent d’énergie mécanique, sous forme de mouvements (rotations ou translations, continues ou alternatives), qui agissent sur la matière d’œuvre.
Les actionneurs les plus couramment utilisés sont :
 Vérin pneumatique |
 Résistance électrique |
|
 Moteur à courant continu |
 Moteur pas à pas |
… mais aussi le moteur hydraulique, le vérin rotatif, …
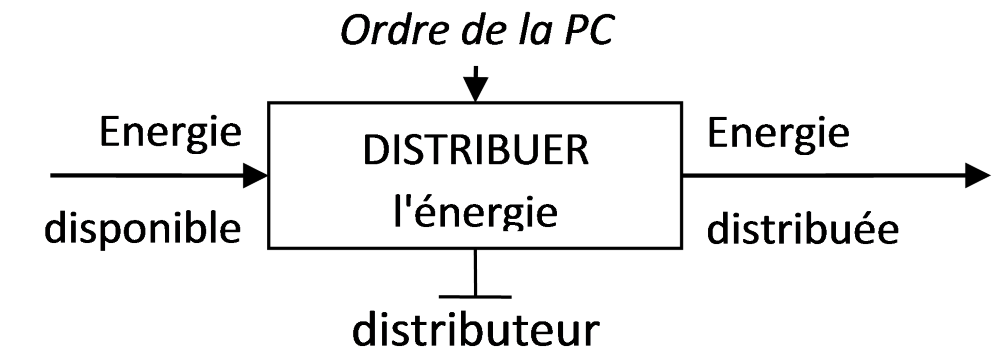 Un distributeur (ou pré-actionneur) reçoit ses ordres de la PC, pour distribuer l’énergie disponible vers un actionneur.
Un distributeur (ou pré-actionneur) reçoit ses ordres de la PC, pour distribuer l’énergie disponible vers un actionneur.
La distribution peut prendre plusieurs aspects :
• Variation : valeur variable d’une des grandeurs de l’énergie
• Pilotage : tout ou rien
• Asservissement ou régulation : réponse à une consigne
Les distributeurs les plus couramment rencontrés sont :
 Transistor |
 Contacteur électromagnétique |
 Relais électrique |
 Un transmetteur reçoit l’énergie mécanique délivrée par l’actionneur pour l’adapter à(aux) effecteurs(s). Il s’agit de modifier les caractéristiques de la puissance (vitesse, force, …), du type de mouvement (rotation, translation,…) ou des axes du mouvement.
Un transmetteur reçoit l’énergie mécanique délivrée par l’actionneur pour l’adapter à(aux) effecteurs(s). Il s’agit de modifier les caractéristiques de la puissance (vitesse, force, …), du type de mouvement (rotation, translation,…) ou des axes du mouvement.
Les transmetteurs les plus couramment utilisés sont :
 Vis+écrou |
 Poulies+Courroie crantée |
 Réducteur à engrenages |
 Poulies+courroies trapézoïdales |



