
Robot franchisseur
Groupe 2
Clément ANGELIER, Zakaria BELFODIL, Mathis MEYNIEL
Objectifs
Le robot franchiseur doit permettre d’accéder à toutes les pièces d’une habitation (franchir les marches, les obstacles, les seuils…). Il peut avoir différentes fonctions :
- Transport de personne
- Observation
- Transport de matériel
- …
Moyens
- Lego Mindstorm NXT
- Pièces de Lego
- Programmation avec le logiciel Lego
- ou avec un smartphone !
Réalisations
Première version du robot

Le problème, c’est qu’il ne peut pas faire demi-tout dans l’escalier !
Deuxième version du robot
On a tenté un nouveau robot mais celui-ci n’a pas marché.
construction de 2 nouveaux robots. 2 différents. 1 avec roue et l’autre avec chenille. Pas eu le temps pour faire les essais.

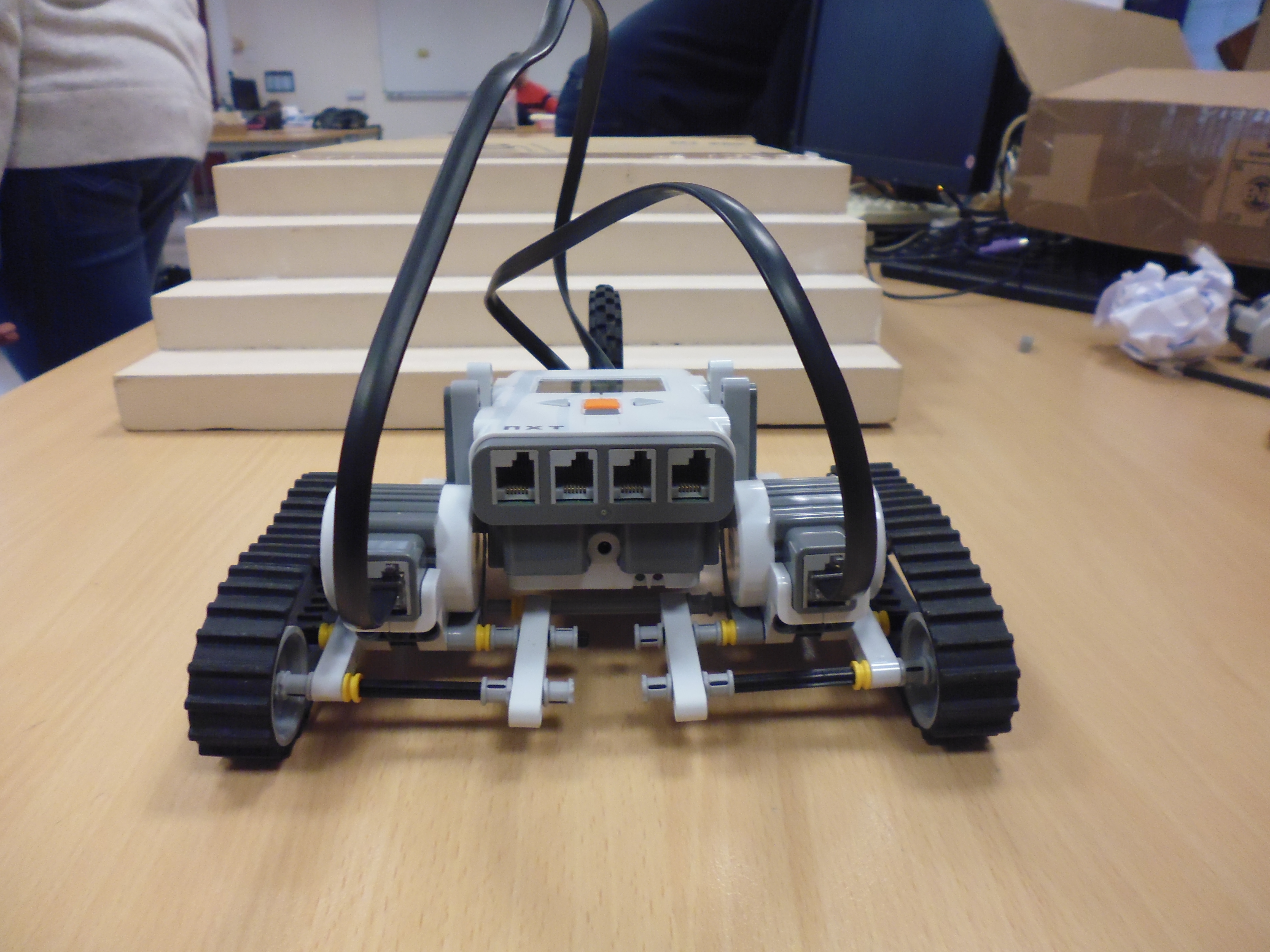

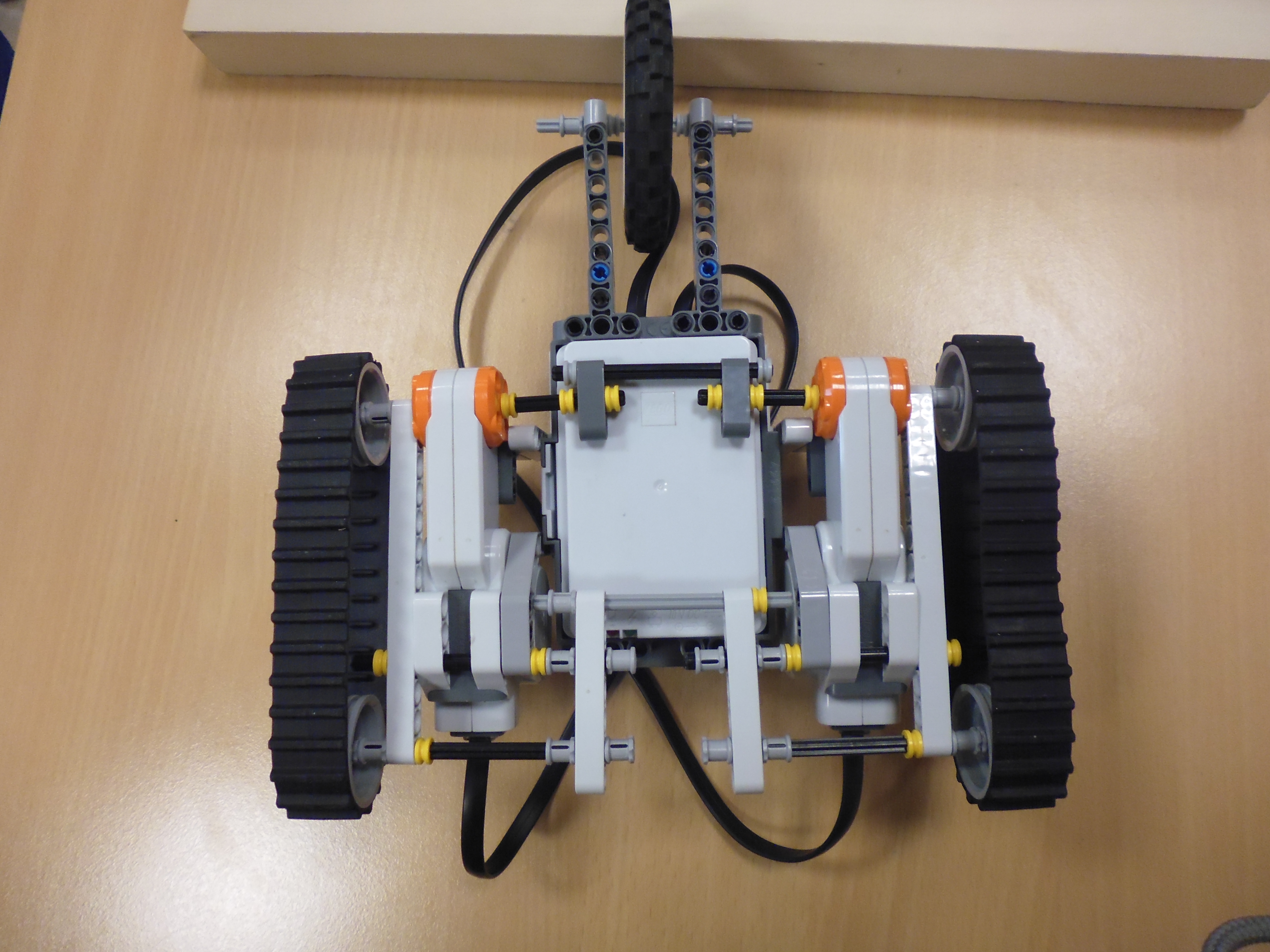
Avec ces photos on peut voir les différentes vues du nouveau robot.
Avec ce robot on arrive à monter et descendre les escaliers mais il a des difficultés à tourner au milieu de l’escalier.
Nous n’avons pas eu le temps d’en innover un autre, nous avons donc refait le premier robot en l’améliorant.
Carnet de bord
| Date |
Activité recherche documentaire, formation technique, analyse fonctionnelle, expérimentation simulation |
Réalisation conception fabrication assemblage |
Objectifs pour la prochaine séance |
Remarques |
| 14/12 | Recherches de solutions Etude de solutions existantes |
|||
| 11/01 | Conception mécanique robot | Début de conception d’un robot à chenilles | ||
| 18/01 | Conception robot et pilotage avec logiciel LEGO Essais et vidéos |
Rigidification de l’ensemble | ||
| 01/02 | Amélioration de la commande | Pilotage du robot avec un Android | ||
| 08/02 | ||||
| 03/05 | Dernière séance ! Finalisation de la construction de la version 1 Réalisation de vidéos |