
Hexapode d’assistance
Groupe 5
Guillaume CHAPPUIS, Roméo FROUIN, Paul REGNAT
Objectifs
Le robot hexapode doit être capable d’accéder à des endroits difficiles d’accès dans le but de remplir une mission d’assistance (observation, transport de matériel) à des équipes de secours sur des lieux sinistrés (incendies, tremblements de terre, …)
Moyens
Base de départ : le Xpider ! (Xpider-the-Smallest-Smart-Robot-Spider-in-the-Worl)


A adapter aux besoins et aux ressources du laboratoire …
- Microcontrôleur : Arduino UNO
- Moteurs : Motoréducteur 2 axes 2214 100:1 Pololu
- Un codeur incrémental optique
- Pilotage des moteurs : TB6612
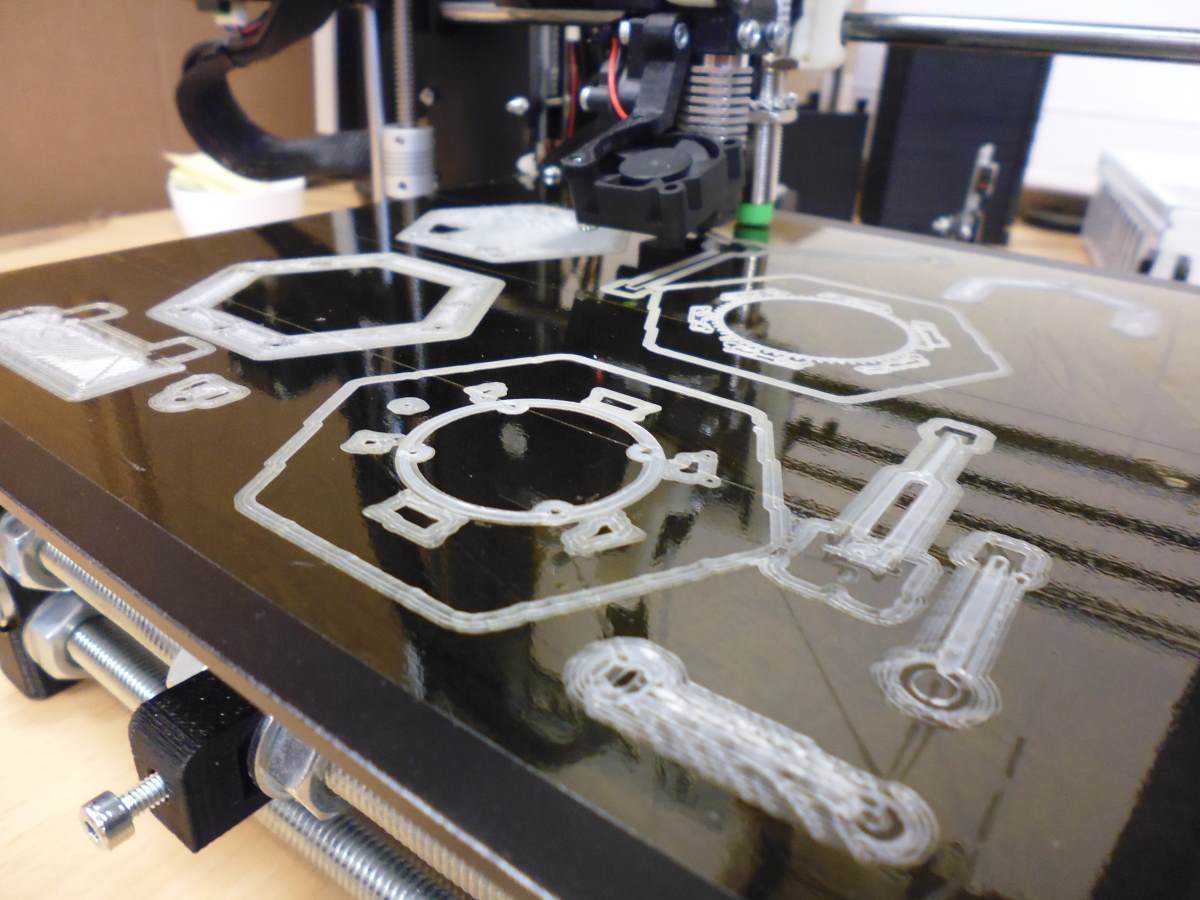
Impression des pièces
Assemblage
L’assemblage s’est avéré très délicat en raison de la très petite taille des pièces …
Premier essai !
Pas très concluant !
Programme
Pour l’utilisation du codeur, nous avons utilisé la méthode décrite sur cet article.
#include <SparkFun_TB6612.h>
#define AIN1 7
#define BIN1 9
#define AIN2 6
#define BIN2 10
#define PWMA 5
#define PWMB 11
#define STBY 8
int pinA = 2; // Le port D2 est associé à l'interruption 0
int pinB = 3;
volatile int pos = 0; // Position (en nombre de pas) du codeur
const int offsetA = 1;
const int offsetB = 1;
// Initialisation des moteurs
Motor motor1 = Motor(AIN1, AIN2, PWMA, offsetA, STBY); // Rotation
Motor motor2 = Motor(BIN1, BIN2, PWMB, offsetB, STBY); // Avance
void setup()
{
Serial.begin(115200);
Serial.println("Xpider");
pinMode(pinB, INPUT);
attachInterrupt(0, front, FALLING); // Détection des deux types de fronts
}
void loop()
{
// Avance 4 secondes
motor2.drive(150,4000);
motor2.brake();
delay(1000);
// Rotation 300 pas
pos = 0;
while (abs(pos) < 300)
{motor1.drive(150);
delay(1);} //
motor1.brake();
delay(1000);
}
void front() {
int s = digitalRead(pinB);
if (s == LOW) {
++pos;
}
else {
--pos;
}
}
Carnet de bord
| Date |
Activité recherche documentaire, formation technique, analyse fonctionnelle, expérimentation simulation |
Réalisation conception fabrication assemblage |
Objectifs pour la prochaine séance |
Remarques |
| Formation Arduino | ||||
| 14/12 | Découverte du robot Xpider (notamment avec la maquette numérique SW) | Assemblage d’une première version (imprimée 3D) du Xpider | ||
| 11/01 | Préparation des pièces (perçages, ajustements, limage, …) | Suite de l’assemblage du robot | ||
| 18/01 | Mise en œuvre d’un moteur CC avec un Arduino | Suite de l’assemblage du robot | ||
| 01/02 | Modification de certaines liaisons (vis >> axe) | Impression de nouvelles pièces | ||
| 01/03 | ||||
| 08/03 | Visite entreprise UKAD | |||
| 22/03 | ||||
| 03/04 | Suite du montage | |||
| 03/05 | Arduino détruit ! (erreur de branchement de l’alimentation) | à remplacer | ||
| 17/05 | Journée de valorisation à Ladoux |