Volet roulant électrique
Objectif
Concevoir un système à adapter sur la sangle d’un volet roulant afin d’aider les personnes en perte de mobilité à ouvrir et fermer les volets.
Moyens
Recyclage d’une perceuse sans fil ou d’un moteur d’essuie glace
Modélisation volumique avec Solidworksjjj
Programmation d’une interface utilisateur sous Android avec App Inventor
Carnet de bord
Recherche sur les systèmes existants :
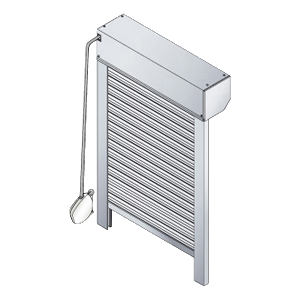
I) Modèle dans le commerce :
II) Contraintes du boitier :
Le boitier doit être adapter a la longueur de sangle.
Capteur de température pour éviter que le moteur brule.
Puissance de moteur ni trop forte, ni trop faible.
Budget.
Etude préliminaire
Le projet initial a été de récupérer des rouleaux d’entrainement d’imprimante pour entraîner la sangle par friction.
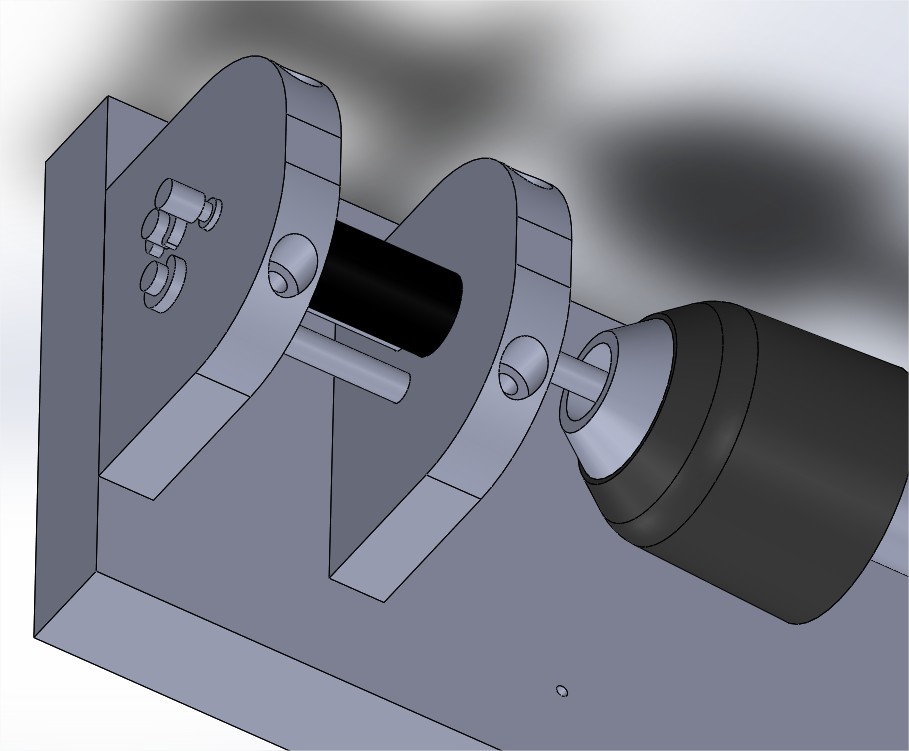
Mais le volet était trop lourd, la sangle glisse, le volet ne monte pas !
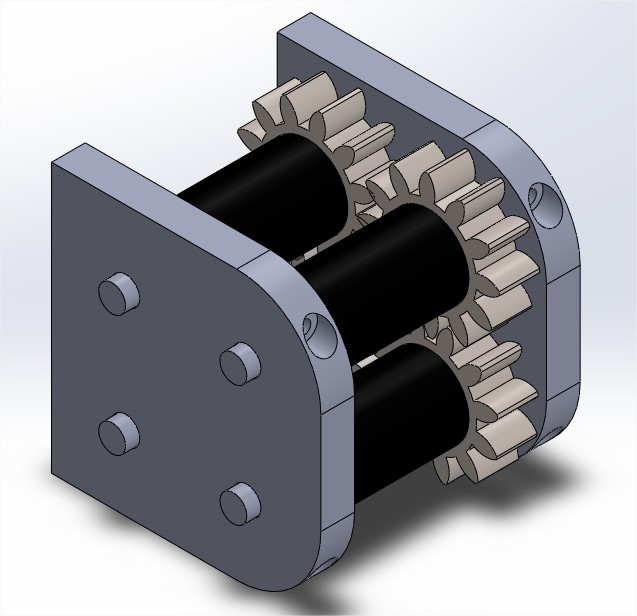
Nous avons augmenté la surface en contact avec la sangle en augmentant le nombre de rouleaux tout en augmentant leur diamètre. finalement 2 rouleaux ont suffit.

Programmation de la carte Arduino
Voici le logigramme de notre programme :

Pour la reception Bluetooth :
if (bluetooth.available()) // If the bluetooth sent any characters
{
controle = bluetooth.read();
Serial.println(controle);
if (controle == '2')
{
motorGo(0, CCW, 0);
motorGo(0, CCW, SPEED); //Motor1
Serial.println(analogRead(cspin[0]));
}
else if (controle == '8')
{
motorGo(0, CW, 0);
motorGo(0, CW, SPEED); //Motor1
Serial.println(analogRead(cspin[0]));
}
else motorOff(0);
}
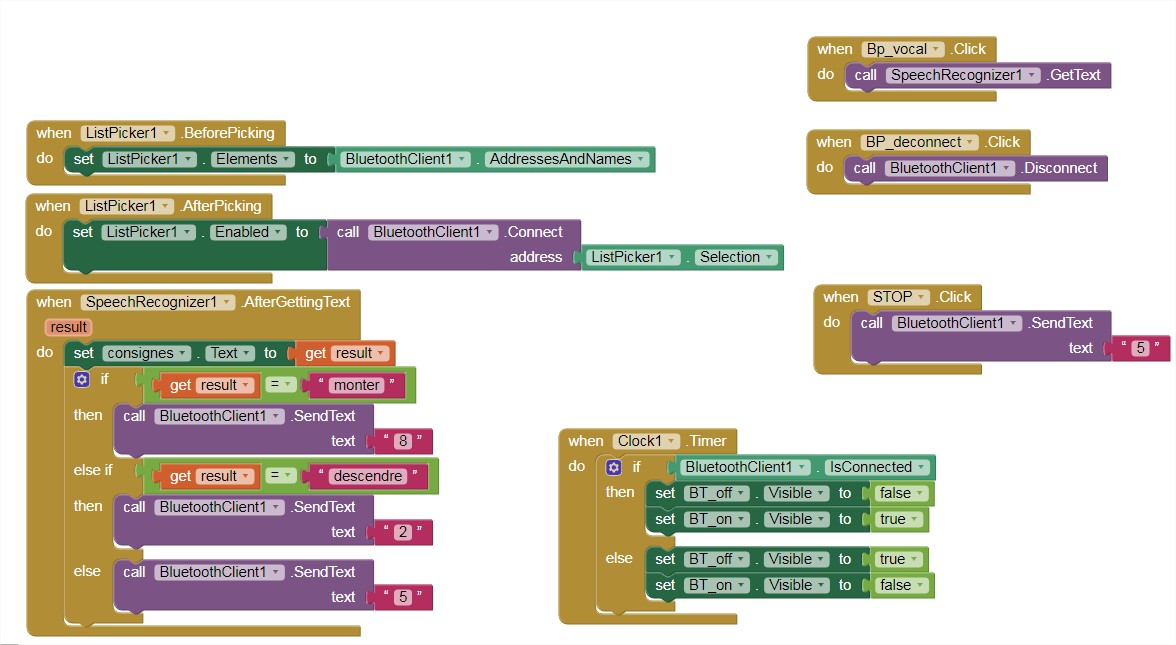
Ensuite on a créé un programme App Inventor pour piloter le volet par Smartphone (avec commande vocale) :